中文体育类核心期刊
中国人文社会科学期刊AMI综合评价(A刊)核心期刊
《中文社会科学引文索引》(CSSCI)来源期刊
美国《剑桥科学文摘》(CSA)收录期刊
中国高校百佳科技期刊
中文体育类核心期刊
中国人文社会科学期刊AMI综合评价(A刊)核心期刊
《中文社会科学引文索引》(CSSCI)来源期刊
美国《剑桥科学文摘》(CSA)收录期刊
中国高校百佳科技期刊
| Citation: |
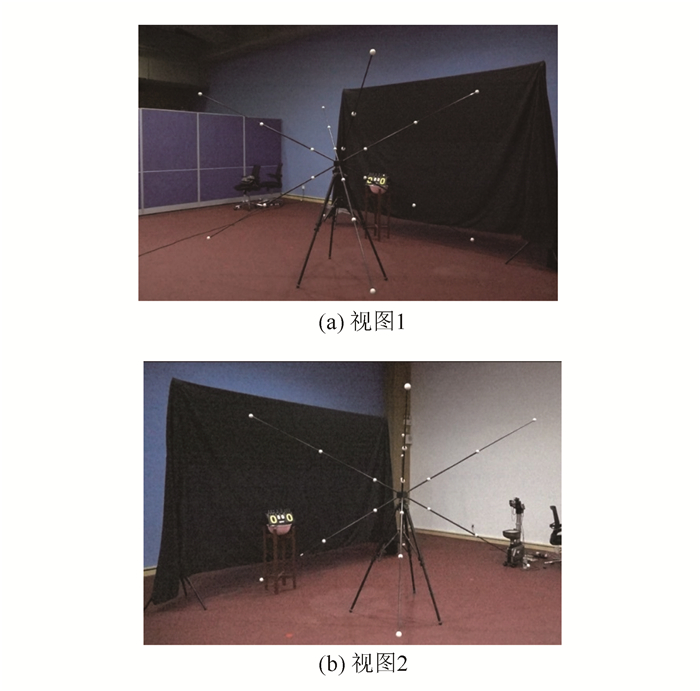
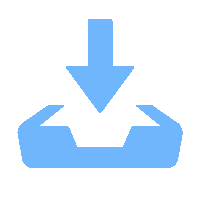
JI Yunfeng, HUANG Rui, SHI Zhihao, REN Jie. Artificial Neural Network Model for the Data of Precise Rotation, Velocity and Placement in Table Tennis[J]. Journal of Shanghai University of Sport, 2018, 42(6): 98-103. DOI: 10.16099/j.sus.2018.06.014

|
| [1] |
AKRIA N, YUKI O.Robotic table tennis based on physical models of aerodynamics and rebounds[C]//Robotics and Biomimetics(ROBIO), IEEE International Conference.[s.l.]: [s.n.], 2011: 2348-2354 https://www.researchgate.net/publication/254025486_Robotic_table_tennis_based_on_physical_models_of_aerodynamics_and_rebounds
|
| [2] |
NAKASHIMA A, TSUDA Y, LIU C, et al.A real-time measuring method of translational/rotational velocity of a table tennis ball[C]//Proceeding of 5th IFAC Symposium on Mechatronic Systems.[s.l.]: [s.n.], 2010: 732-738
|
| [3] |
苏虎, 徐德, 陈国栋, 等.基于两阶段多目标模糊决策的乒乓球机器人击球点选择[J].控制理论与应用, 2013, 30(5):597-603 http://d.old.wanfangdata.com.cn/Periodical/kzllyyy201305009
|
| [4] |
HUANG Y, XU D, TAN M, et al.Trajectory prediction of spinning ball for ping-pong player robot[C]//2011 IEEE/RSJ Int Conf on Intelligent Robots and Systems.San Francisco: [s.n.], 2011: 3434-3439 https://www.researchgate.net/publication/221066696_Trajectory_prediction_of_spinning_ball_for_ping-pong_player_robot
|
| [5] |
LIU C, HAYAKAWA Y, NAKASHIMA A.A registration algorithm for on-line measuring the rotational velocity of a table tennis ball[C]//Proceeding of IEEE/RSJ International Conference on Intelligent Robots and Systems.[s.l.]: [s.n.], 2012: 2270-2275 https://www.researchgate.net/publication/241628593_A_registration_algorithm_for_on-line_measuring_the_rotational_velocity_of_a_table_tennis_ball
|
| [6] |
ZHANG Z, XU D, YU J.Visual measurement and prediction of ball trajectory for table tennis robot[J].IEEE Transactions on Instrumentation and Measurement, 2010, 59(12):3195-3205 doi: 10.1109/TIM.2010.2047128
|
| [7] |
ZHANG Z, XU D, YU J.Research and latest development of ping-pong robot player[C]//7th World Congress on Intelligent Control and Automation.[s.l.]: [s.n.], 2008: 4881-4886 https://www.researchgate.net/publication/224324457_Research_and_Latest_Development_of_Ping-Pong_Robot_Player
|
| [8] |
任艳青, 徐德, 谭民.旋转球与乒乓球台/球拍的反弹模型[J].控制理论与应用, 2012, 29(11):1433-1439 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzllyyy201211008
|
| [9] |
任艳青, 方灶军, 徐德, 等.基于模糊神经网络的乒乓球旋转飞行轨迹模式分类[J].控制与决策, 2014, 29(2):263-269 http://d.old.wanfangdata.com.cn/Periodical/kzyjc201402013
|
| [10] |
季云峰, 施之皓, 任杰, 等.基于单目视觉伺服系统的高速旋转球体三维速度测定[J].中国体育科技, 2017, 53(2):139-144 http://d.old.wanfangdata.com.cn/Periodical/zgtykj201702019
|
| [11] |
季云峰, 陆爱发, 任杰, 等.基于乒乓球机器人视觉系统的单色乒乓球旋转三维速度测定[J].上海体育学院学报, 2017, 41(3):83-88 http://www.stxb1959.com/WKE/WebPublication/paperDigest.aspx?paperID=79bd6537-b79c-44ba-9714-815ffad07257
|
| [12] |
张远辉, 韦巍.在线角速度估计的乒乓球机器人视觉测量方法[J].浙江大学学报(工学版), 2012, 46(7):1320-1326 doi: 10.3785/j.issn.1008-973X.2012.07.026
|
| [13] |
张康洁, 王奇志.无迹卡尔曼滤波在旋转乒乓球轨迹预测中的应用[J].计算机科学, 2014, 41(1):83-87 doi: 10.3969/j.issn.1002-137X.2014.01.014
|
| [14] |
孙智宇.乒乓球轨迹预测与分类研究[D].北京: 北京交通大学, 2015: 33-40 http://cdmd.cnki.com.cn/Article/CDMD-10004-1015611160.htm
|
| [15] |
陈海英, 郭巧, 徐力.基于神经网络的人体100 m跑运动能力综合评价[J].中国体育科技, 2003, 39(2):1-3 doi: 10.3969/j.issn.1002-9826.2003.02.001
|
| [16] |
张鸿燕, 狄征.Levenberg-Marquardt算法的一种新解释[J].计算机工程与应用, 2009, 45(19):5-8 doi: 10.3778/j.issn.1002-8331.2009.19.002
|
| [17] |
WANG G, WANG C, DU Q, et al.Distributed cooperative control of multiple nonholonomic mobile robots[J].Journal of Intelligent & Robotic Systems, 2016, 83(3):525-541 doi: 10.1007/s10846-015-0316-x
|
| [18] |
WANG G, WANG C, DU Q, et al.Distributed adaptive output consensus control of second-order systems containing unknown non-linear control gains[J].International Journal of Systems Science, 2016, 47(14):3350-3363 doi: 10.1080/00207721.2016.1139760
|
| 1. |
陈磊,陈元欣,吕万刚. 城市商业综合体体育场景:生成逻辑、内涵特征与价值表达. 上海体育学院学报. 2024(01): 59-71+81 .

| |
| 2. |
时宵,陈元欣,陈磊,刘恒. 体育服务综合体消费场景维度设计与营造策略. 体育与科学. 2024(01): 106-113 .
| |
| 3. |
甯琪. 体育运动项目助力商贸经济发展的路径探析. 文体用品与科技. 2024(11): 73-75 .
| |
| 4. |
周学龙. 体育服务行业标准化管理的机制与实施策略研究——以运动员培训和赛事组织为例. 中国标准化. 2024(13): 101-104 .
| |
| 5. |
陈利. 我国冰雪体育休闲产业服务综合体消费场景品质提升研究. 冰雪运动. 2024(05): 81-85 .
| |
| 6. |
焦陈旺,王杰. 长三角一体化背景下安徽省体育赛事发展现状与未来出路. 黄山学院学报. 2024(05): 98-101 .
| |
| 7. |
罗朝中,张德胜. 适老化数字体育中三重互动关系的逻辑建构——基于可供性视角下老年行动者实践行为研究. 体育科学. 2023(10): 26-33+44 .
| |
| 8. |
陈元欣,郑芒芒,张强,周彪,刘恒,时宵. 新时代我国体育场地设施高质量发展的价值意蕴与行动方略. 天津体育学院学报. 2022(06): 704-710 .
|
 DownLoad:
DownLoad: